
Yellow Belt Program Certification (YBP)
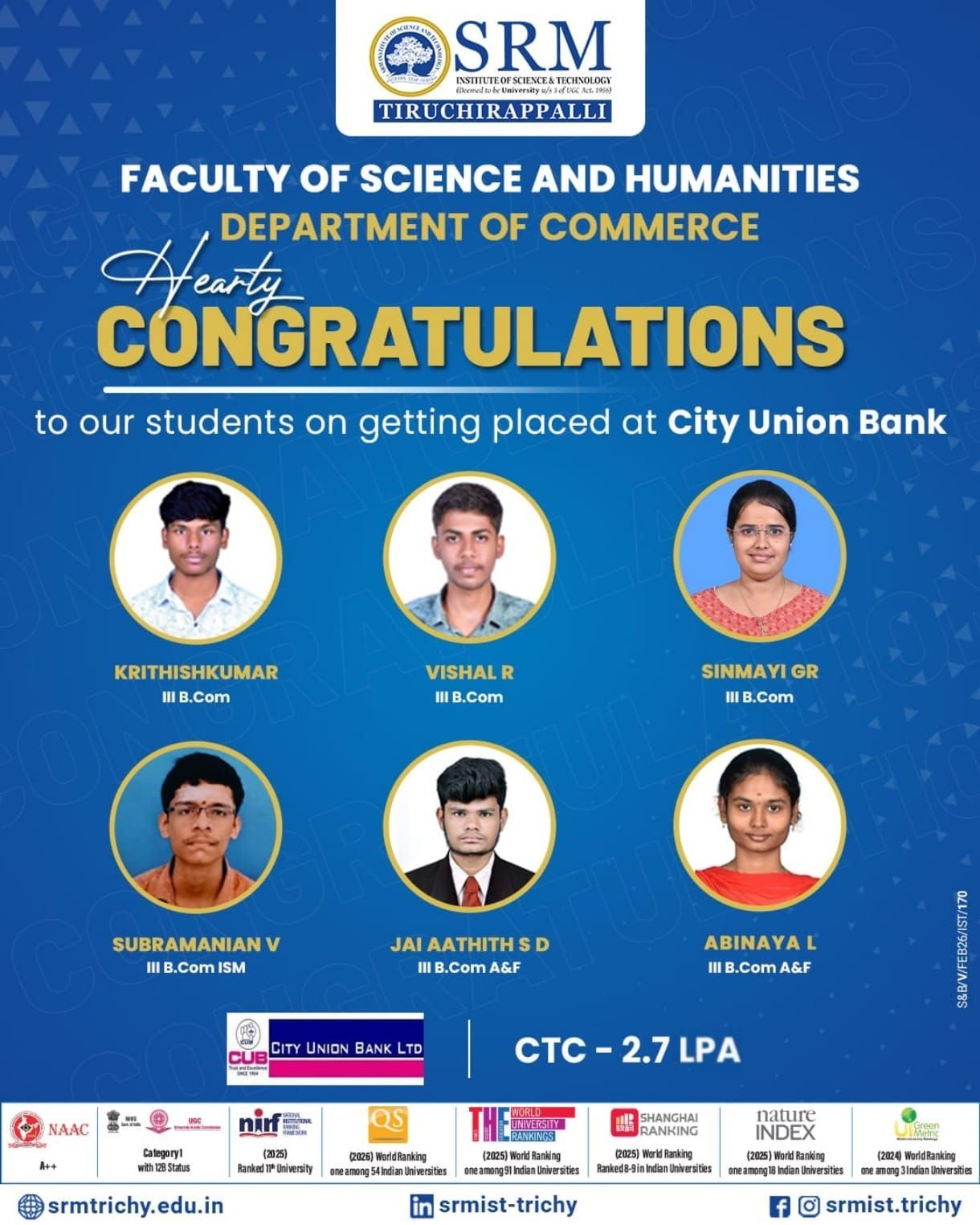
Commerce Students Placed at City Union Bank
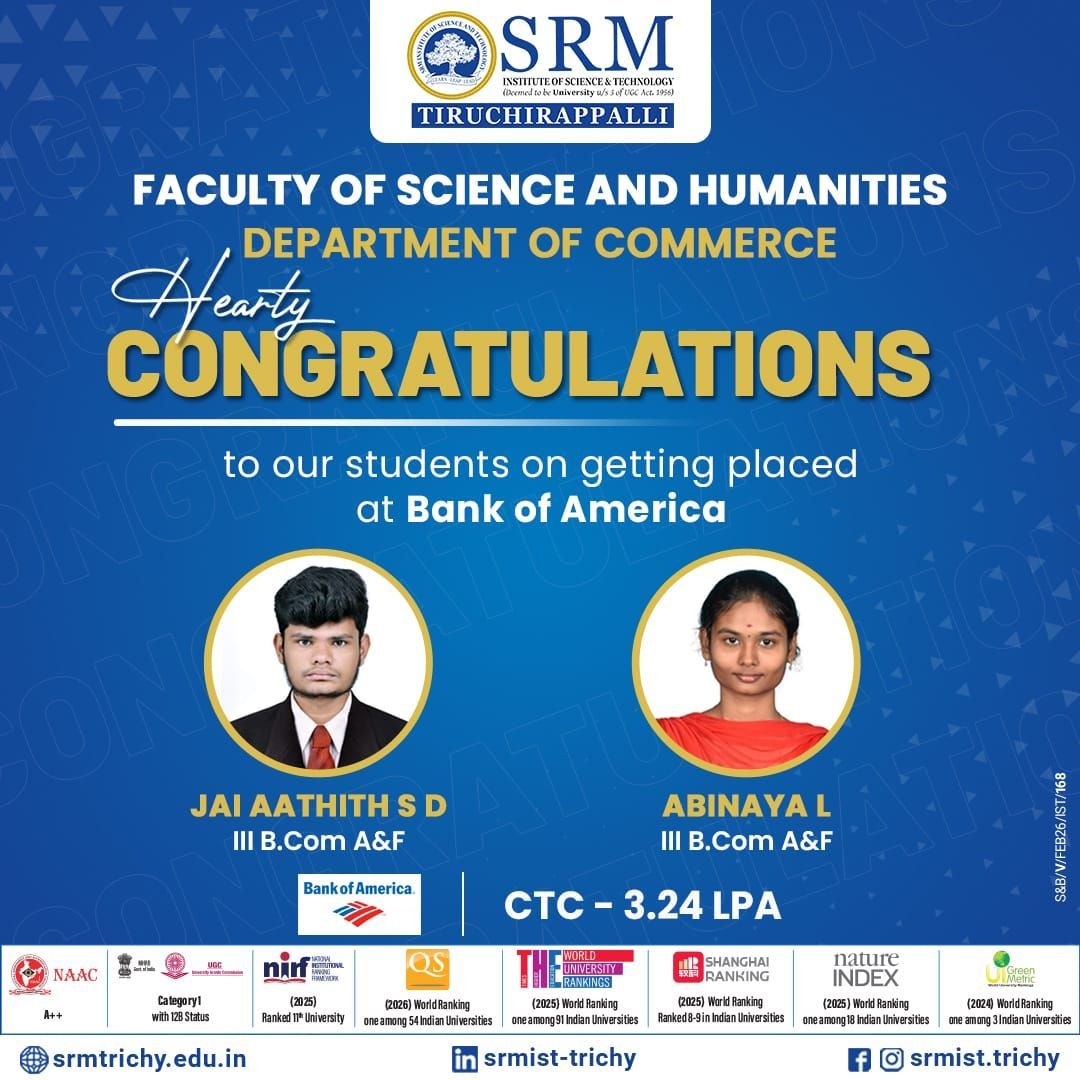
B.Com Students Placed at Bank of America

Commerce Students Placed at Accenture
III BBA Student Placed at Bank of America

III BBA Students Successfully Placed at TCS

III Year BBA Students Successfully Placed

B.Sc Computer Science Student Placements

BCA Data Science Student Placements

Final Year BCA Data Science Student of SRMIST Tiruchirappalli Successfully Placed at First Source Solutions Ltd., Chennai